服务热线
18500300266服务热线
18500300266
The motion control project of China University of Petroleum (East China) undertaken by our company has recently completed construction, which includes sliding self-balancing bias inverted pendulum and high order flexible linear control system. The appearance, volume, experimental function, easy operation and debugging training of the equipment have been recognized by the user teachers, and many papers have been published with this equipment.
The project equipment is more order, the complexity of the multiple input multiple output control system, adjustable multiple variables, can increase the secondary drive, has many configuration options, flexible structures, systems designed for the openness, provide Simulink programming environment, its biggest advantage is to provide accurate dynamics model and various control algorithm, is to control the learning, The ideal platform for science teaching, scientific research and graduation design. In many famous universities in the United States is the control laboratory necessary equipment, often appears in the dynamics and control of the teaching materials, in foreign control papers often used as a verification platform for evaluation of control methods.
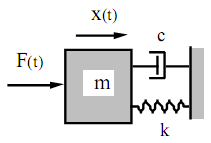
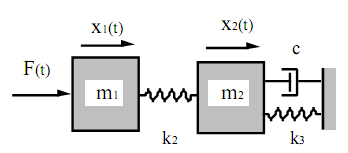
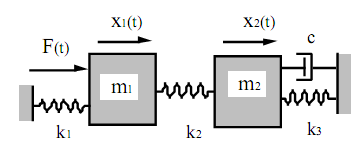
M210 High order flexible linear control system
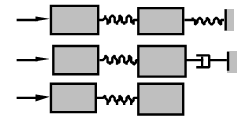
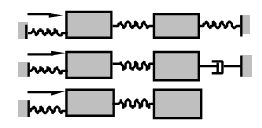
The experimental system often appears in dynamics and control textbooks and serves as a benchmark platform for evaluating control methods. Its dynamic characteristics are usually equivalent to those of a straight line torsion device with parameter adjustment function. The system has a variety of configurations and visualizes dynamic systems and general control problems.
The mechanical structure of the system has adjustable mass block, variable spring and adjustable damper. Like the experimental high order flexible torsional control system, the system can demonstrate such basic problems as rigid-body PID control, lead/lag compensation, phase and gain margin, trajectory tracking and adjustment, and advanced high order juxtaposition and unjuxtaposition system control. At the same time, the remarkable characteristics of flexible systems, such as modal, natural frequency, transient and frequency response characteristics, can also be demonstrated. A secondary driver (optional) can be added to any output (mass block carrier) to form a multiple input multiple output (MIMO) system (requiring USR or RTWT/RTLT applications) for active disturbance rejection research.
configuration | 12 standard configurations, 16 if a third mass block is included (optional), 18 if a secondary drive is included |
The dynamic characteristics | Order 2, 4, and 6 (with an optional third mass block), typical systems of Type 0, 1,and 2 |
I/O | SISO, SIMO, MMO (with secondary drive) |
Zero pole | The adjustable 15-7 hz |
Mass block adjustment ratio | 5-1 |
Elastic coefficient adjustment ratio | 2:1 |
Damping coefficient regulation ratio | "Now |
feedback | High resolution encoder, 160 p/mm |
actuator | High torque brushless servo motor. Precision pinion and rack, 8N output force |
Test bench size | 31x92x15cm- |
Security features | Power amplifier overcurrent protection, motion limit micro switch & pad. Complete system firmware: relative displacement protection, overspeed protection and heat accumulation protection. |
Experiment content:
1. System identification & Dynamic Modeling;
2. Rigid PD&PID control;
3. Basic open-loop & closed-loop characteristics (second-order system, transient response and frequency response, rigid & flexible body, modal & frequency, time-domain & frequency domain relationship);
4. Phase & gain margin;
5. Nyquist stability;
6. Root trajectory design;
7. Parameter change sensitivity;
8. Robust control;
9. Tracking control;
10. Active disturbance rejection (secondary drive required);
11. Flexible structure control (notch filter, juxtaposed sensor/actuator, non-juxtaposed control, low permission closed-loop control & high permission closed-loop control, pole assignment, linear quadratic regulator);
12. Practical control issues (drive saturation, sensor quantization, discrete time sampling, custom control execution);
13. The versatility of reconfigurable devices and interface software can support the study of almost all problems in practical control systems. The experimental device is very suitable for the study of rigid body and high order discrete flexible system.
12 kinds of system standard
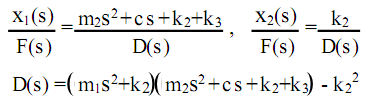
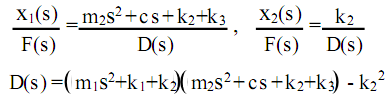
The system model |
|
|
|
Other Related Configurations |
|
|
|
Other Related Configurations |
|
|
|
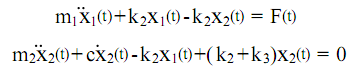
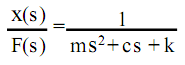
City of frequency equation |
|
|
|
features | ● Classic damping oscillator ● Double damping mode Pole win =2 Can be configured as type 0, type 1, or type 2 typical system | ● Double damping mode Can be configured as type 0, type 1, or type 2 typical system
| ● Double damping mode All configurations are type 0, typical system |
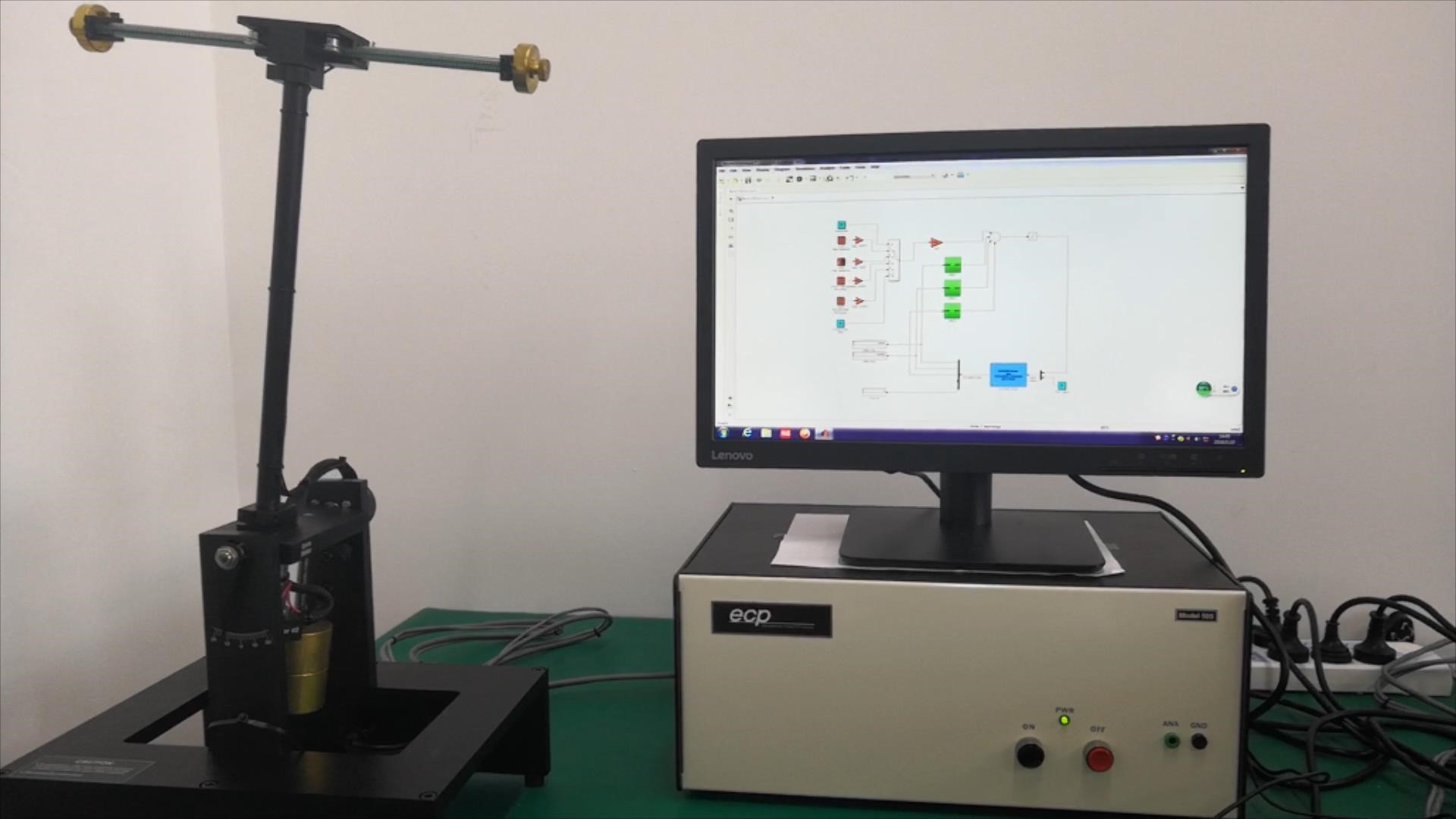
M505 Sliding self-balancing inverted pendulum
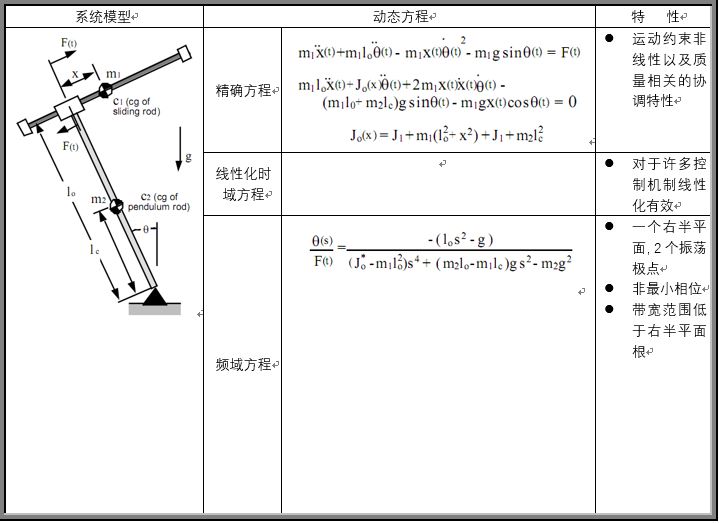
The design of the sliding self-balancing offset inverted pendulum visualizes the necessity and effectiveness of closed-loop control. Different from the traditional vehicle-mounted inverted pendulum, the inverted pendulum controls the vertical pendulum by balancing a horizontal bar affected by gravity. The zero and pole of the system are all located in the right half plane and have nonlinear coupling of motion and gravity. By adjusting the weight block mass and changing the system characteristic root, the control problem can be realized from relatively simple to theoretically impossible.
The mechanical structure of the system includes detachable/adjustable torque arms with counterweights on horizontal and vertical bars for rapid system dynamic adjustment. Linear and rotating spherical bearings at the joints achieve low friction and consistent dynamic performance.
The dynamic characteristics | Fourth order, non-minimum phase, open loop instability, motion and gravity coupled nonlinear |
Parameter adjustment | Adjustable vertical and horizontal rod mass, inertia and center of gravity offset |
I/O | SISO,SIMO |
The pole | Adjustable, 0.4-1.2Hz |
feedback | High resolution encoder (16.000p/I, Angle; 44.000 p/m, displacement) |
actuator | High torque density, rare earth permanent magnet motor |
Test bench size | 30x30x40 cm |
Security features | Range limit microswitch (horizontal lever), fail-safe shutdown, limit pad (vertical lever), amplifier overcurrent protection, complete system firmware: heat accumulation protection |
The inverted pendulum experiment is a nonlinear control system with zero and pole in the right half plane (linearization of dynamic model for some design methods)
Experiment content:
1. System identification & Dynamic modeling
2. Continuous closed-loop design
Enhanced dynamic filtering control
4.LQR control design
5. Tracking control
System Standard configuration

Copyright © 2012-2020 北京青铄鑫业科技有限公司 版权所有 京ICP备 13039369号
地址:北京市昌平区黄平路19号院4号10层 电话:18500300266 邮箱:sale@tsingso.com

关注我们